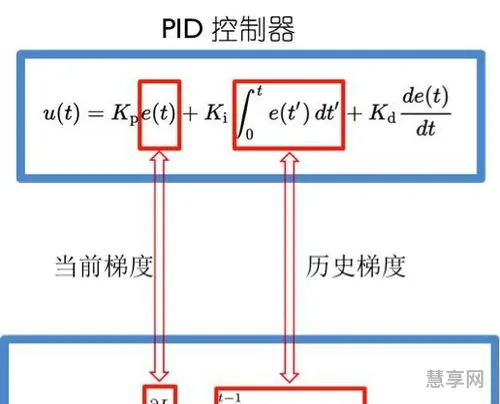
pid调节器(温度pid控制)
pid调节器
)对控制器(controller)的输出没有影响。在这种控制系统中,不依赖将被控量反送回来以形成任何闭环回路。
-loopcontrolsystem)的特点是系统被控对象的输出(被控制量)会反送回来影响控制器的输出,形成一个或多个
信号相反,则称为负反馈(NegativeFeedback),若极性相同,则称为正反馈,一般闭环控制系统均采用负反馈,又称
及其控制器或智能控制器(仪表)已经很多,产品已在工程实际中得到了广泛的应用,有各种各样的PID控制器产品,各大公司均开发了具有PID参数自
温度pid控制
这种情况下由于衰减太快,要测量操作周期比较困难,但可测取从施加干扰开始至第一个波峰飞升时间Tr。10:1衰减曲线法整定调节参数步骤和4:1衰减曲线法完全一致,仅采用的
PID参数整定式控制系统设计的核心内容。它是根据被控过程的特性确定PID控制器的比例系数、积分时间和微分时间的大小。主要可分为两大类:
常用于温度控制系统。除采用微分作用外,在使用控制系统时要注意测量传送的滞后问题,如温度测量元件的选择和安装位置等。在常规PID控制器中
控制器就成为纯比例控制器。实际上积分作用很少单独使用,通常与比例作用一起使用,使其既具有把偏差放大(或缩小)的比例作用,又具有将偏差随时间累积的积分作用,且其作用方向是一致的。这时控制器的输出为:△P=Ke+△Pi,式中△P为控制器输出值的变化;Ke为比例作用引起的输出;△Pi为积分作用引起的输出
数字式PID调节器说明书
(即Ti=∞,Td=0),比例度适当取值,调节系统按纯比例作用投入。系统稳定后,逐步减小比例度,根据工艺操作的许可程度加2%-3%的干扰,观察调节过程变化情况,直到调节过程变化达到规定的
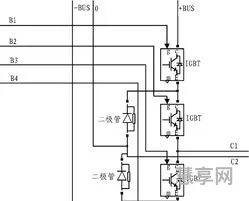
在之前自己写的论文里,也做过类似的电流采样和占空比更新的时序分析,见下图7。(有区别,之后有机会可以分析一下)。
4)最后把比例度减小到计算值上,通过观察曲线,也就是“静观运行勤调整,细心寻求最佳值”。即适当地进行各参数的微调,以达到满意的控制效果。
比例度(即比例带)越大,控制器的放大倍数越小,被控参数的曲线越平稳;比例度越小,控制器的放大倍数越大,被控参数的曲线越波动